Spring
Linear translational spring with optional mass
![]()
Library
Modelica/Mechanics/MultiBody/Forces
Description
Linear spring acting as line force between frame_a and frame_b. A force f is exerted on the origin of frame_b and with opposite sign on the origin of frame_a along the line from the origin of frame_a to the origin of frame_b according to the equation:
f = c*(s - s_unstretched);
where "c" and "s_unstretched" are parameters and "s" is the distance between the origin of frame_a and the origin of frame_b.
Optionally, the mass of the spring is taken into account by a point mass located on the line between frame_a and frame_b (default: middle of the line). If the spring mass is zero, the additional equations to handle the mass are removed.
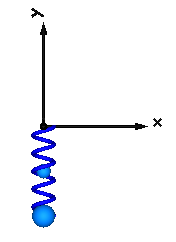
In the following figure a typical animation of the spring is shown. The blue sphere in the middle of the spring characterizes the location of the point mass.
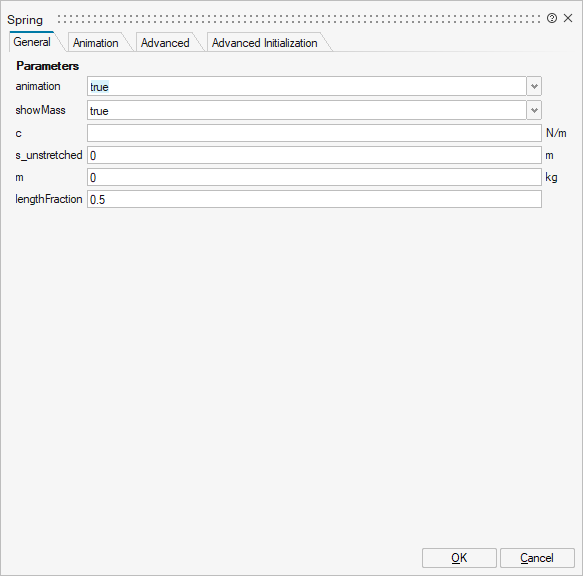
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_animation | animation | = true, if animation shall be enabled | Scalar | true |
mo_showMass | showMass | = true, if point mass shall be visualized as sphere if animation=true and m>0 | Scalar | true |
mo_c | c | Spring constant | Scalar | |
mo_s_unstretched | s_unstretched | Unstretched spring length | Scalar | |
mo_m | m | Spring mass located on the connection line between the origin of frame_a and the origin of frame_b | Scalar | |
mo_lengthFraction | lengthFraction | Location of spring mass with respect to frame_a as a fraction of the distance from frame_a to frame_b (=0: at frame_a; =1: at frame_b) | Scalar |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
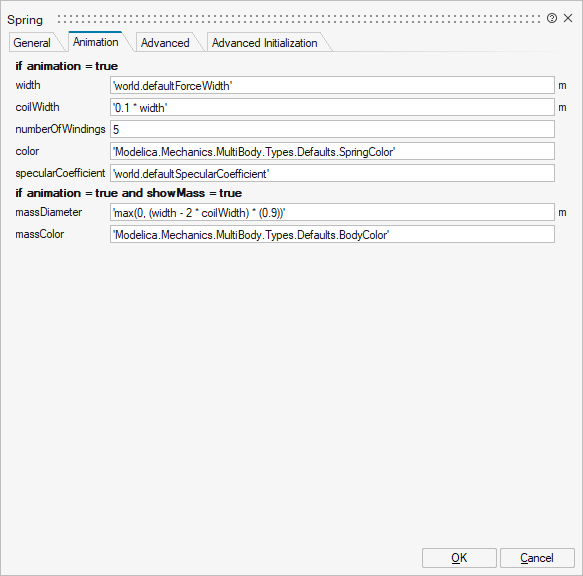
mo_width | width | Width of spring | Scalar | |
mo_coilWidth | coilWidth | Width of spring coil | Scalar | |
mo_numberOfWindings | numberOfWindings | Number of spring windings | Scalar | |
mo_color | color | Color of spring | Vector of size 3 | |
mo_specularCoefficient | specularCoefficient | Reflection of ambient light (= 0: light is completely absorbed) | Scalar | |
mo_massDiameter | massDiameter | Diameter of mass point sphere | Scalar | |
mo_massColor | massColor | Color of mass point | Vector of size 3 |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
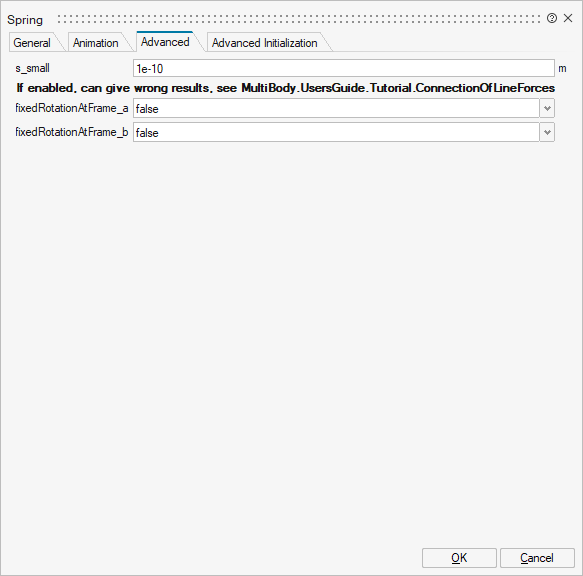
mo_s_small | s_small | Prevent zero-division if distance between frame_a and frame_b is zero | Scalar | |
mo_fixedRotationAtFrame_a | fixedRotationAtFrame_a | =true, if rotation frame_a.R is fixed (to directly connect line forces) | Scalar | true |
mo_fixedRotationAtFrame_b | fixedRotationAtFrame_b | =true, if rotation frame_b.R is fixed (to directly connect line forces) | Scalar | true |
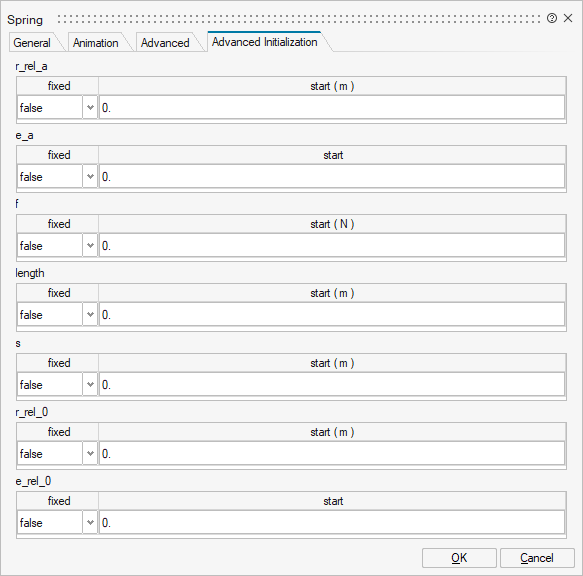
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_r_rel_a | r_rel_a | r_rel_a | Structure | |
mo_r_rel_a/fixed | fixed | Cell of vectors of size 3 | true | |
mo_r_rel_a/start | start | Cell of vectors of size 3 | ||
mo_e_a | e_a | e_a | Structure | |
mo_e_a/fixed | fixed | Cell of vectors of size 3 | true | |
mo_e_a/start | start | Cell of vectors of size 3 | ||
mo_f | f | f | Structure | |
mo_f/fixed | fixed | Cell of scalars | true | |
mo_f/start | start | Cell of scalars | ||
mo_length | length | length | Structure | |
mo_length/fixed | fixed | Cell of scalars | true | |
mo_length/start | start | Cell of scalars | ||
mo_s | s | s | Structure | |
mo_s/fixed | fixed | Cell of scalars | true | |
mo_s/start | start | Cell of scalars | ||
mo_r_rel_0 | r_rel_0 | r_rel_0 | Structure | |
mo_r_rel_0/fixed | fixed | Cell of vectors of size 3 | true | |
mo_r_rel_0/start | start | Cell of vectors of size 3 | ||
mo_e_rel_0 | e_rel_0 | e_rel_0 | Structure | |
mo_e_rel_0/fixed | fixed | Cell of vectors of size 3 | true | |
mo_e_rel_0/start | start | Cell of vectors of size 3 |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
frame_a | implicit | Coordinate system a fixed to the component with one cut-force and cut-torque | input | 1 |
frame_b | implicit | Coordinate system b fixed to the component with one cut-force and cut-torque | output | 1 |