limPID
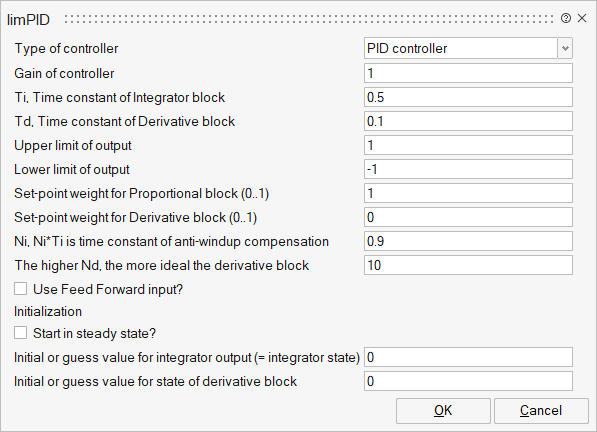
P, PI, PD, and PID controller with limited output, anti-windup compensation, setpoint weighting and optional feed-forwardBased on MSL Modelica LimPID block
![]()
Library
Activate/Dynamical
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
ControllerType | Type of controller | Structure | ||
ControllerType/P | P controller | Number | 0 | |
ControllerType/PI | PI controller | Number | 0 | |
ControllerType/PD | PD controller | Number | 0 | |
ControllerType/PID | PID controller | Number | 0 | |
k | Gain of controller | Scalar | ||
Ti | Ti, Time constant of Integrator block | Scalar | ||
Td | Td, Time constant of Derivative block | Scalar | ||
yMax | Upper limit of output | Scalar | ||
yMin | Lower limit of output | Scalar | ||
wp | Set-point weight for Proportional block (0..1) | Scalar | ||
wd | Set-point weight for Derivative block (0..1) | Scalar | ||
Ni | Ni, Ni*Ti is time constant of anti-windup compensation | Scalar | ||
Nd | The higher Nd, the more ideal the derivative block | Scalar | ||
withFeedForward | Use Feed Forward input? | Number | 0 | |
kFF | Gain of feed-forward input | Scalar | ||
steadyState | Start in steady state? | Number | 0 | |
xi_start | Initial or guess value for integrator output (= integrator state) | Scalar | ||
xd_start | Initial or guess value for state of derivative block | Scalar |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
Port 1 | explicit | input | 2+withFeedForward | |
y | explicit | output | 1 |