For implementation, see the Texas Instruments Digital Motor Control document.
Integral Gain*dT: Indicates the integral gain pre-multiplied by the system dt. For example, for Ki = 0.5 and dt = 0.01, the coefficient is 0.005.
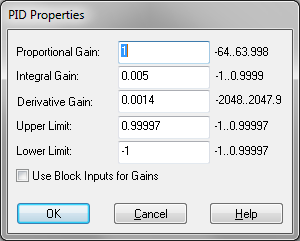
Lower Limit: Indicates the lower limit of PI output.
Proportional Gain: Indicates the proportional gain.
Upper Limit: Limits internal integrator and PI output.
Use Block Inputs for Gains: Adds additional inputs for the P (proportional) and I (integral) gains.