Embedded Category: C2407, F280x
Block Category: TI 16-bit DMC, TI 32-bit DMC
cmd = command input
ref = plant measurement input
out = PID output
Operating Mode Availability
•Simulation mode: YES
•C code generation mode: YES
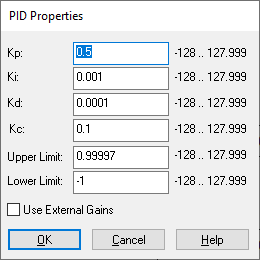
The PID Regulator block implements a fixed-point PID controller.
Kc: Indicates the speed at which the PID value comes out of a saturated limit condition.
Kd: Indicates the controller gain proportional to derivative of (cmd-ref).
Ki: Indicates the controller gain proportional to integral of (cmd-ref).
Kp: Indicates the controller gain proportional to (cmd-ref).
Lower Limit: Indicates the lower limit on both output and integral state.
Upper Limit: Indicates the upper limit on both output and integral state.
Use External Gains: Lets you use external gains rather than Kp, Ki, Kd, and Kc.