When calibrating a new control design, a common way to validate a new design is to compare its performance with an existing floating-point implementation. In the elevator_door_regular diagram, system performance of the digital control system being designed is compared with the performance of an existing analog control system.
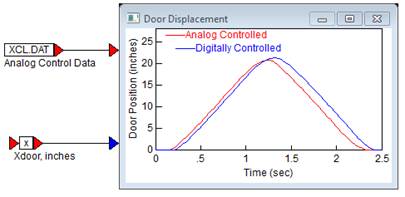
The door displacement profile of an existing system (XCL.DAT) is brought into the simulation using an import block and compared to the door displacement profile resulting from the current implementation.
By simulating the model, you can make refinements in the control strategy, as well as fine-tune the controller performance.
Once it is determined that the floating-point controller is performing adequately, the next step is to implement the controller using limited precision fixed-point blocks. This lets you simulate the behavior of the controller as it would behave as an embedded system in a fixed-point target, such as a DSP or a microcontroller.