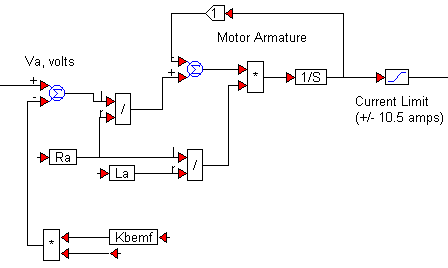
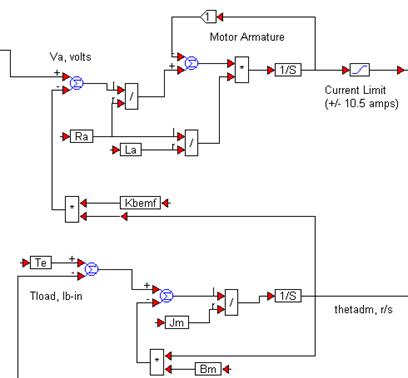
To model the DC motor, the effective voltage is the difference between the applied voltage and back-emf. The motor armature is modeled as a simple first-order system with resistance Ra and inductance La. The motor current is limited to +/- 10.5A.
To compute the back-emf, the back-emf gain Kbemf is multiplied by the angular velocity. Angular velocity is computed using the electrical torque and load torque.
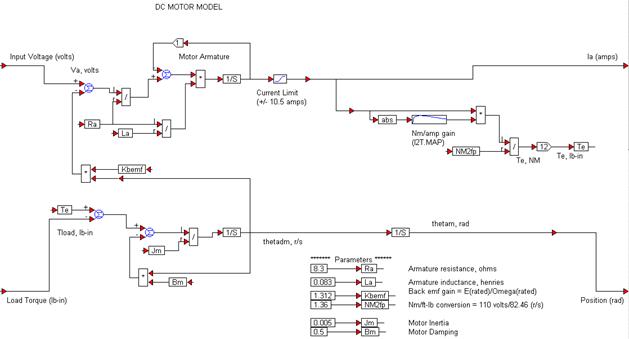
A set of const blocks defines the required motor parameters. The motor angular velocity thetadm is integrated to yield position. The electrical torque Te is computed using the motor armature current, and the I2T.MAP look-up table contains the motor’s current-torque characteristics. This data is obtained from the motor’s specification sheets or through the vendor. The complete motor model is shown below.
Note: The eMotor toolbox includes a full set of pre-configured, pre-tested, and ready-to-use blocks, such as motors, amplifiers, loads, sensors, and controllers.