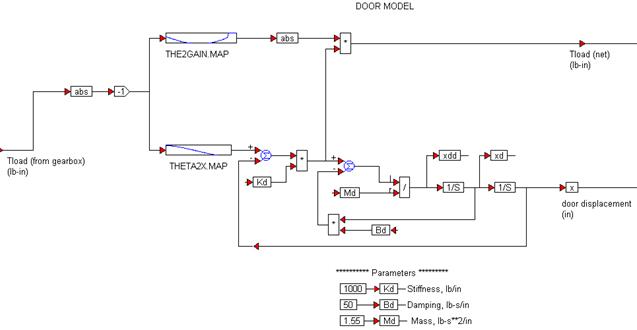
At a basic level, the door system can be thought of as an additional translational load that is connected to the motor through an intermediate rotational load (that is, the gearbox.) As such, the door-system imposes its own mechanical elements to the system: mass, stiffness, inertia, and damping. The input to the model is the rotation/position of the gearbox, and the outputs are the linear displacement of the door assembly in inches and the total system mechanical load torque in lb-in. The simple second order dynamical model and the related system parameters can be implemented as shown below.
Two look-up tables – THE2GAIN.MAP and THETA2X.MAP – are used for easy modeling of the dependency of the load torque aspects and the relationship between the angular gear-shaft motion and the linear motion of the door-assembly.