Block Category: TI MotorWare
Block Inputs
•vbus: Bus voltage scaled to unity. The value 1 is nominal bus voltage.
•ia and ib: Clarke Transform 3-phase current measurement scaled to unity for the peak current.
•va and vb: Clarke Transform 3-phase voltage measurement scaled to unity for peak voltage.
You use the Angle Estimator block to define parameters for the motor, motor controller, and motor identification algorithm.
To use the Estimator Read Property or Estimator Write Property blocks, you must have either a Motor Control or Angle Estimator block in your diagram.
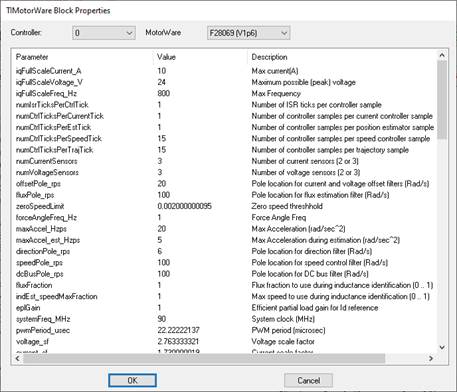
Controller: Indicates the controller. This value must match the Controller value in the Estimator Read and Estimator Write blocks.
MotorWare: Specifies the version of MotorWare.
Parameter, Value, Description window: Lists the editable motor, motor controller, and motor identification algorithm values. To change the value of a parameter, double click on the value. For more information on the motor, motor controller, and motor identification algorithm values, see the Texas Instruments InstaSPIN documentation.